| 10micron
GM2000 QCI German mount |
||
| |
||
|
|
||
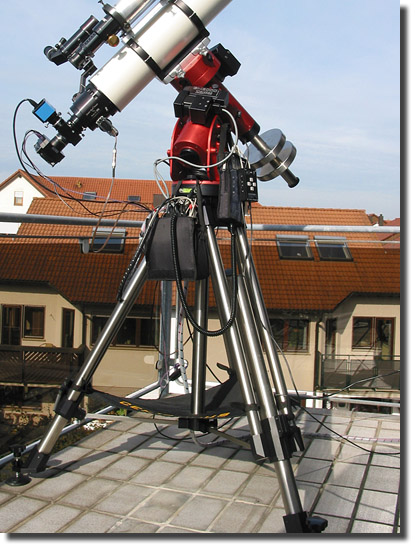
Especially in astrophotography the stability of a mount is hugely important. Given that I had some irresolvable technical problems with the previous mount, I finally chose a GM2000, the “bella macchina” from Italy. I came to this decision when I first saw the mount in action, used by a friend. Two versions of the GM2000 are available. In the ultraport-version the DEC- and RA-part can be separated from each other. The axes in the monolith-version are fixed permanently. For an easier handling I have decided to purchase the separable ulraport-version. In this layout none of the parts is heavier than 15kg. |
||
|
|
||
| GM2000
on Centaurus Tripod |
||

|
||
| Mounting-Plate: |
||
|
||
 |
||
Centaurus stainless steel tripod: |
||
|
|
||
|
||
| R.A. part: The image shows the collimation screw for AZ and Alt. All components are made up of aluminium and stainless steel. The screw axle clamp of the Alt-collimation can be set up in four different positions in such a way that pole heights of 22°-66° can be regulated. |
||
 |
||
Even the control dial is completely made up of aluminium and hollow-drilled on the backside! The setscrew consists of stainless steel and has a hexagon socket. |
||

|
The motor transmission units are completely housed in metal. The AC-servomotors are far ahead compared to usual step motors due to their absolutely uniform and smooth movement. A toothed drive belt transfers the force to a worm wheel with no backlash. |
|
 |
||
 |
||
The GM2000 with its RA-unit set up. The bar with the counterweights can be fastened separately. It is precisely ground and slides into the adapter on the backside of the DEC-part with no vacuity. (Thanks to the bayonet) The axis clicks into place very closely-fitting and can be fixed with a screw. |
||
 |
||
The counterweight bar measures 400 mm which is relatively long. It completely consists of massive stainless steel and has a diameter of 40 mm. Since the overall length disturbed me on my balcony, I had the bar cut into two pieces. The lower end can be screwed on with a M16 thread when needed. This optional extension has turned out to be very handy. |
||
 |
||
The extension for the counterweight bar. |
||
 |
||
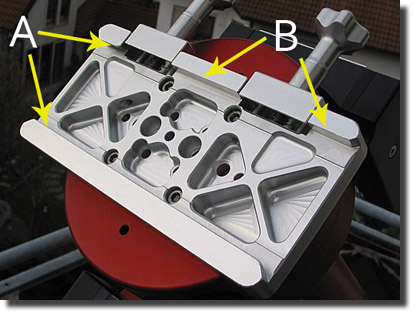
Although the original Baader 2” prism-adapter (compatible with Losmandy) was robust enough, I replaced it with a high-quality model from BT-Technologies. In order to increase the bearing area I had the bottom side of the clamp milled. In addition I had nearly all the dovetail removed on one side so that the dovetail supporting the heavy telescope doesn’t need to be threaded completely. Once 2/3 of the telescope have been put on the lower part of the dovetail, the telescope can be raised up and moved a little backwards. Only on the backmost part the dovetail is present on both sides so that the telescope cannot pivot out any more. In a final step the clamp jaw must be tightened with the T-screw. The clamp jaws are spring borne and can slide on the positioning dowels with virtually no vacuity. |
||
 |
||
A: dovetail present |
||
 |
||
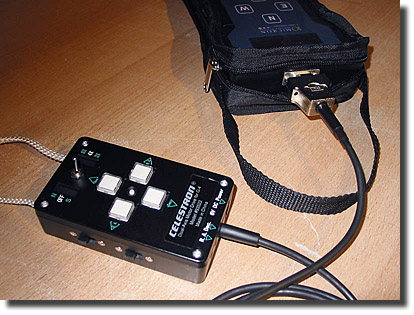
| Control of the mount Two different electronic engineering layouts are available: either as a box in a handy bag (see image) or integrated in the column as an intermediate piece between column and mount. Both versions have their pros and cons. I have settled on the bag version because I don’t want to leave damageable technical equipment outdoors when I don’t use it. Given that the entire control system is embedded in the electronic bodywork, no additional PC is needed for the goto-mode of the GM2000. Especially the firmware offers a number of highlights: The alignment of the mount (initialisation on the actual sky) can be carried out with different sophisticated algorithms. Especially the 3-star method is very recommendable. At first, the mount must be aligned roughly on the polar star. In this process, the mount navigates the telescope to three arbitrary stars listed on a schedule. Even if it is only possible to observe a small section of the sky there will still be available enough stars for reference to choose from. The selected stars must be brought exactly in the middle of the cross-hair eyepiece and can be confirmed with the enter-key. At that stage the really genial part follows: the alignment of the pole To increase the aiming accuracy the steps above can be applied to a larger number of stars (refinement).
|
||
 |
||
Self built retainer on the stand for holding the electronics box. Unfortunately 10micron doesn’t offer any serial solution for this purpose. |
||
 |
||
Tuning For this reason I have built another hand box, which only has the four direction keys and a tappet switch for adjusting the slew-speed. By using the buttons on the side, the direction of the control keys can be inverted. This turns out to be very handy when operating the mount. The little extra hand box can be connected after installing a 9-pole sub-D jack. The correct connections on the plastic foil keyboard can be found by using a circuit indicator. The keys of the extra hand box must simply be connected in parallel to the keys on the plastic foil keyboard. |
||
 |
||
| A little imperfection: the connector casing of the motor cables (15-pole sub-d) is originally made of cheap plastic. However, in specialist electronic shops there are available connector casings of die cast metal. The connector casings can be substituted easily and no brazing is necessary to fix the metal cases.
|
||
 |
||
| The original centring shank had slightly too much vacuity in the bore of the RA-unit (a few 1/10mm). It is a simple M8-allen screw. To increase the accuracy when re-attaching the RA-unit, I had spun an exactly fitting shank of stainless steel. |
||
 |
||
Extension of the column |
||
The following connections can be used at the control logic unit:
|
||
My personal conclusion:
|
||
|
||
Technical data:
|
||