| Equatorial-Plattform | ||
Was ist eine Equatorial-Plattform? Besitzer von Dobson-Teleskopen müssen ein eingestelltes Objekt normalerweise manuell nachführen, weil es bedingt durch die Erdrotation langsam aus dem Gesichtsfeld heraus wandert. Das ist einer der Hauptnachteile bei einer Dobsonmontierung. Dabei muss das Teleskop gleich in 2 Richtungen "geschubst" werden, weil die Objekte einer scheinbaren Kreisbahn folgen. Bei Vergrößerungen jenseits von 300-fach kann dies schnell in Stress ausarten und wenn man nicht aufpasst, ist das Objekt ganz aus dem Blickfeld verschwunden und man muss es bei niedrigerer Vergrößerung erneut suchen. Aus diesem
Grund gibt es die in meinen Augen sehr clevere Erfindung der Meine
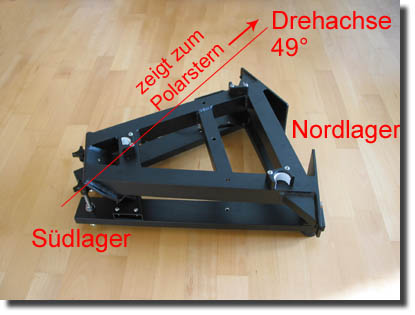
Plattform ist für 49° konstruiert und kann somit von Flensburg
bis hinunter in die Alpen verwendet werden. Die unten
abgebildete EQ-Plattform stammt von Tom Osypowski und führt
ca. 90 Min. lang nach. Danach wird die Plattform manuell "reseted"
in dem man die Top-Platte an einem Griff in die Ausgangsposition
zieht. Das ist in weniger als 2 sec erledigt. Danach können
weitere 90 Min. nachgeführt werden. Als Antrieb wurde ein µ-Prozessor gesteuerter Gleichstrommotor mit Drehwinkel-Sensoren eingesetzt. Somit wird eine last unabhängige gleichmäßige Nachführung erreicht.
|
||
Nachfolgend
zwei Animationen, welche durch Klick auf die jeweiligen Bilder gestartet
werden können. |
||
 |
||
| Animation
1 (klick aufs Bild!) |
||
 |
||
| Animation
2 (klick aufs Bild!) |
||
 |
||
| Darstellung
der Komponenten |
||
 |
||
| Direktantrieb
|
||
|
|
||
 |
||
Südlager und Polhöhenjustierung |
||
|
|
||
 |
||
| Kugelkopf-Standfüße | ||
 |
||
Steuerbox
Mit im Paket enthalten ist ein längeres Kabel für die Handsteuerbox, eine ausführliche Anleitung und sogar zwei hochwertige Gabel- Ringschlüssel für zöllige Schrauben. |
||
|
|
||
|
||
| Tuning: Nichts
ist so perfekt, als dass man es nicht noch optimieren kann. |
||
 |
||
Sogar
das Zubehör ist vom Feinsten. Tom hat sich nicht lumpen lassen
und zur Montage und Demontage der Transportsicherung und zum Einstellen
der Polhöhenjustage professionelle Kombischlüssel mit
dazu gepackt. (Natürlich passend zu den zölligen-Schrauben) |
||